Voici les paramètres de la carte HK KK2.0 (firmware 1.6) pour le quadriolo, quadcoptère décrit dans ce blog par ailleurs.
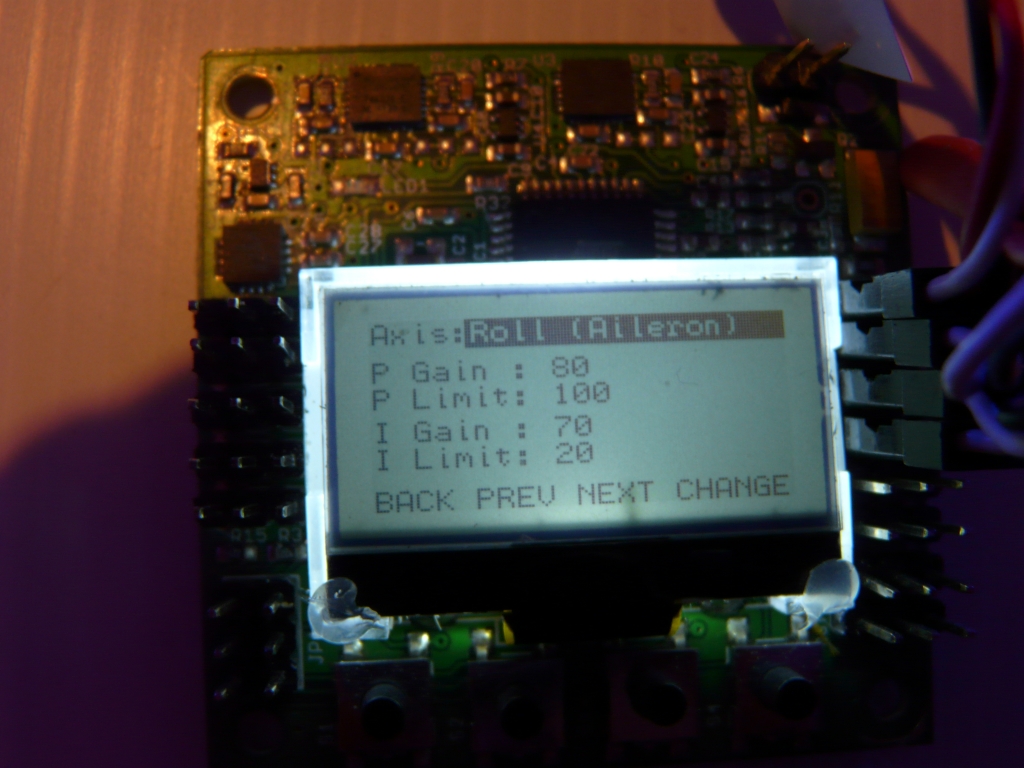
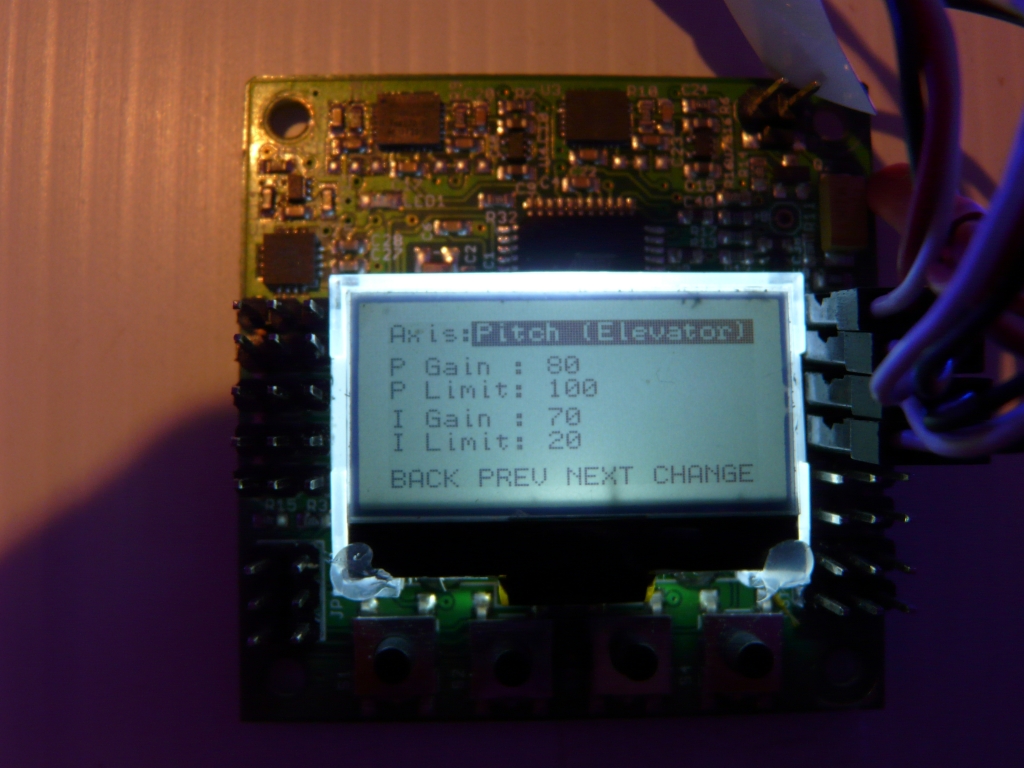
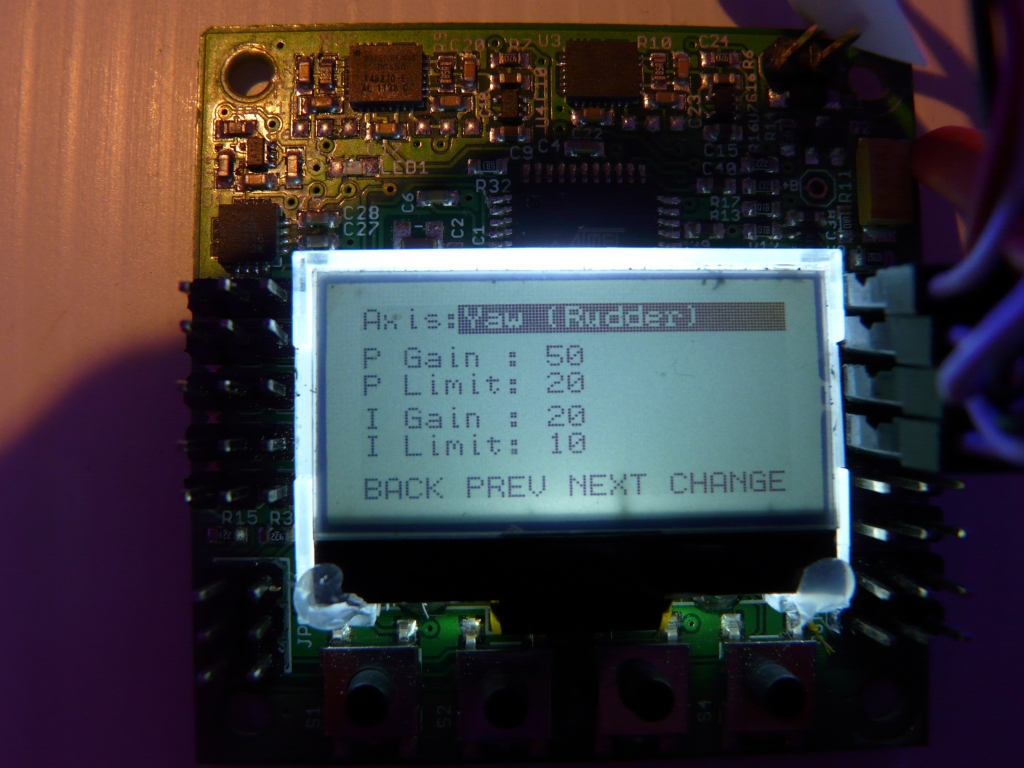

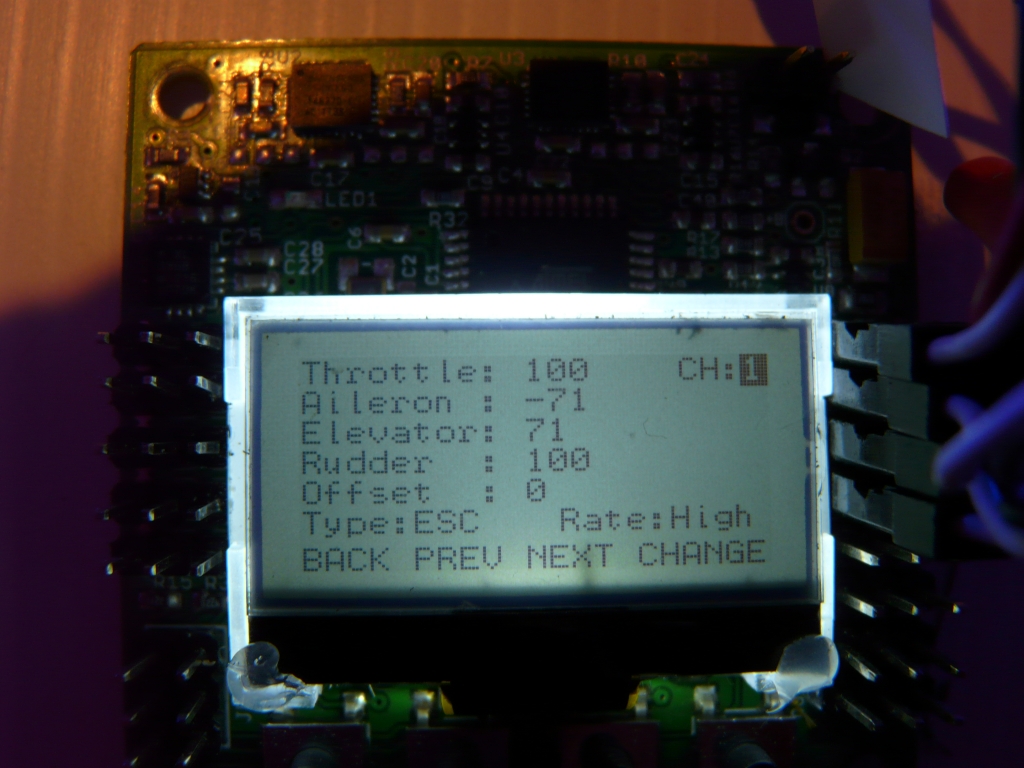
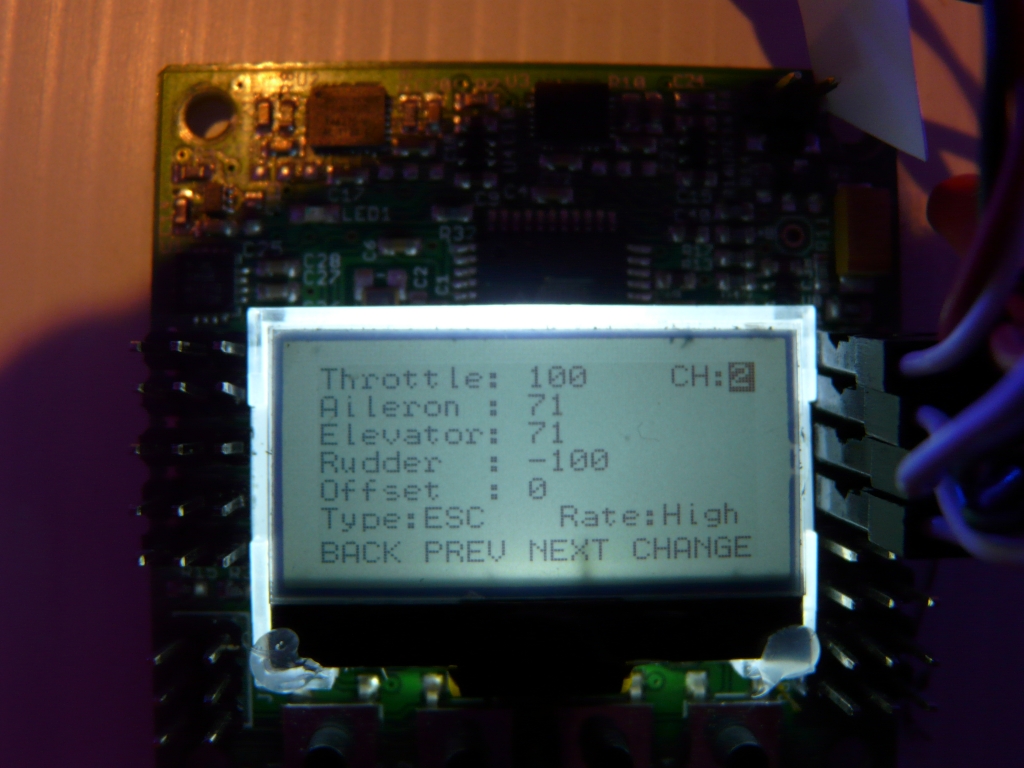

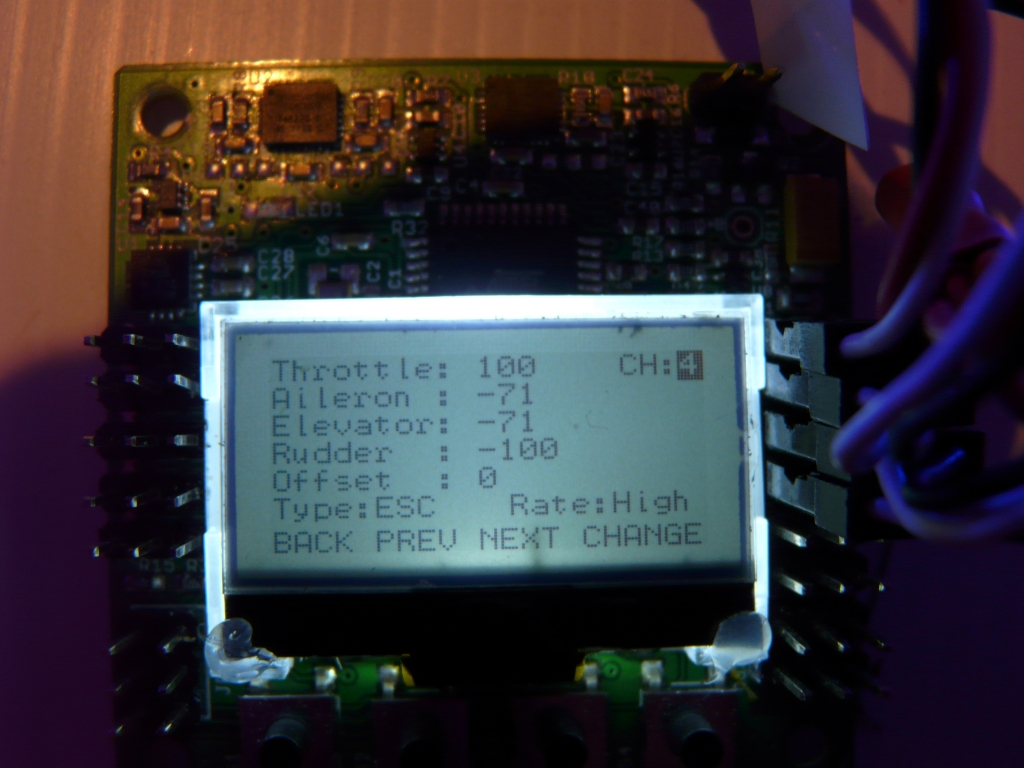

Voici les paramètres de la carte HK KK2.0 (firmware 1.6) pour le quadriolo, quadcoptère décrit dans ce blog par ailleurs.
Un premier vol rapide ce soir à la tombée de la nuit. L'image est un peu sombre il y a du vent mais le quadcopter est bien stable même si il se fait un peu chahuter.
Seconde partie de la construction de l'araignée, ma version du Quadriolo de Eric Latour.
Voici les éléments électroniques qui étaient en attente de livraison. Commande prise auprès de rctimer, qui m'a été recommandé par Eric et que je recommande aussi moi même, car livraison en 10 jours avec des frais très compétitifs. Moteurs, controleurs, et support d'hélice sont prêts à être installés.

Les moteurs sont montés à blanc sur leur support aux extrémités des bras. Ces supports sont verrouillés sur les bras par deux vis de part et d'autres. La fixation des moteurs est faite par 4 colliers en plastique.

Il faut installer les rallonges de fil électrique passant dans les bras avant de les coller sur leur support. Il est nécessaire de le faire avant car ensuite il sera trop compliqué de procéder à leur passage. Avec 4 moteurs et 3 fils pour chaque il faut prévoir 4m de câble, ce n'est pas négligeable.

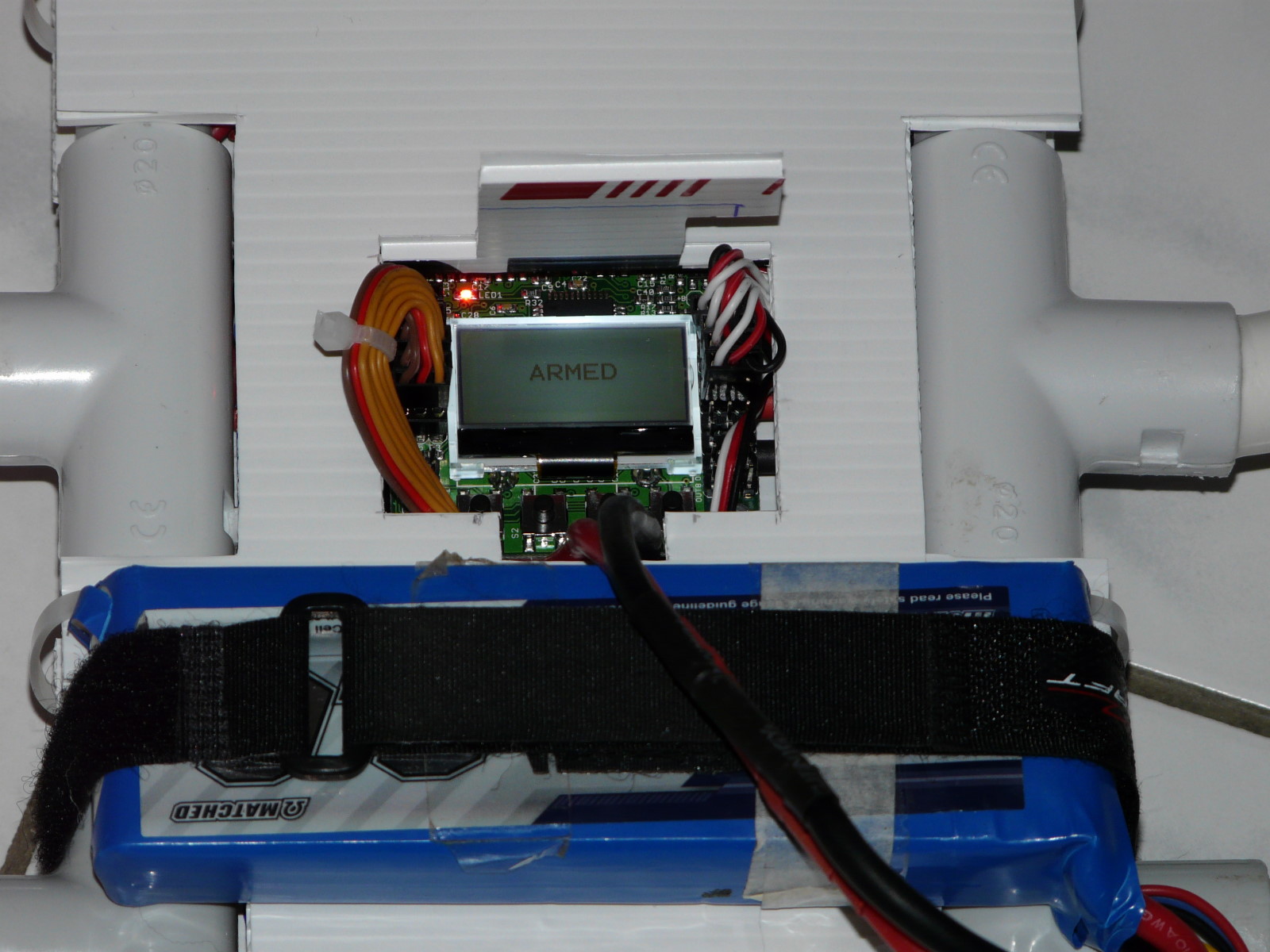
J'ai positionné la carte du quadri rotor sur un support fait d'une plaque de coroplast découpée à la forme du cadre et collée à la colle chaude. J'ai récupéré une chute de manchon d'isolation de tube de cuivre de 20mm de diamètre intérieur, une de chaque coté fixée avec des colliers en plastique permettra d'amortir les atterrissages.


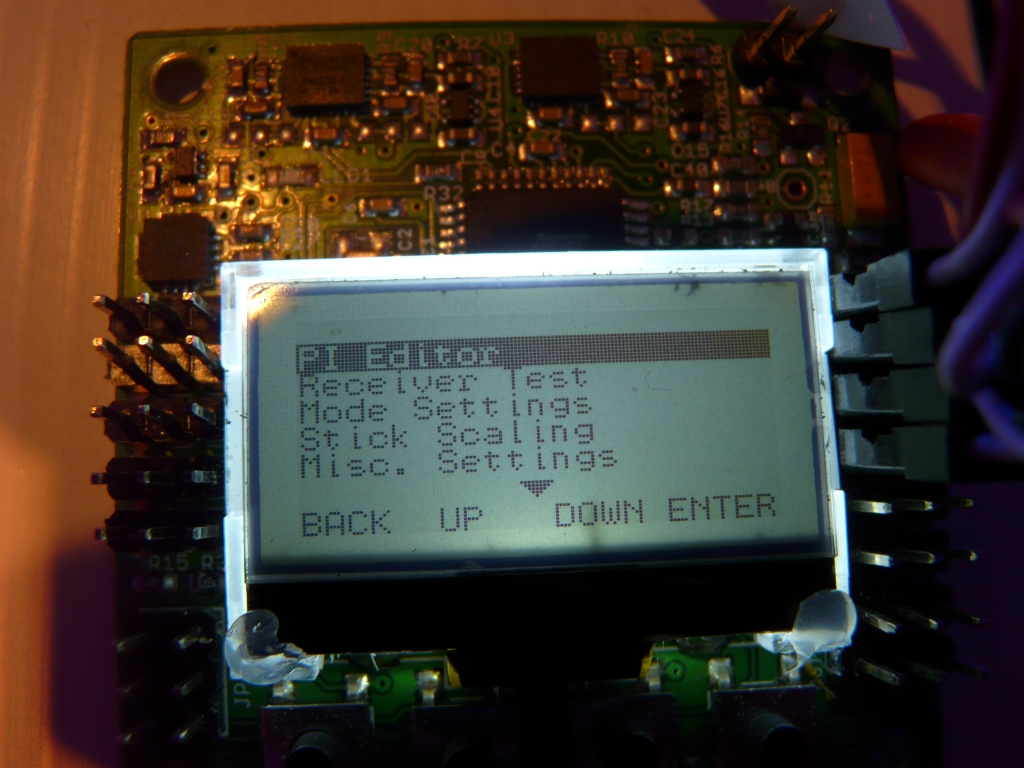
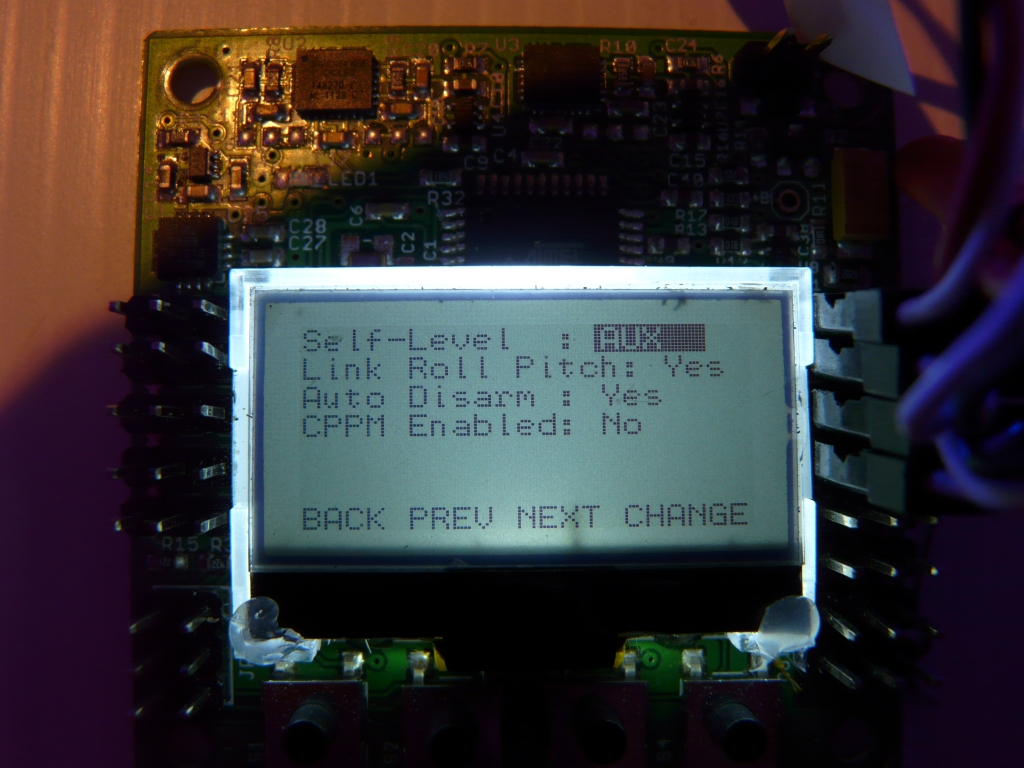
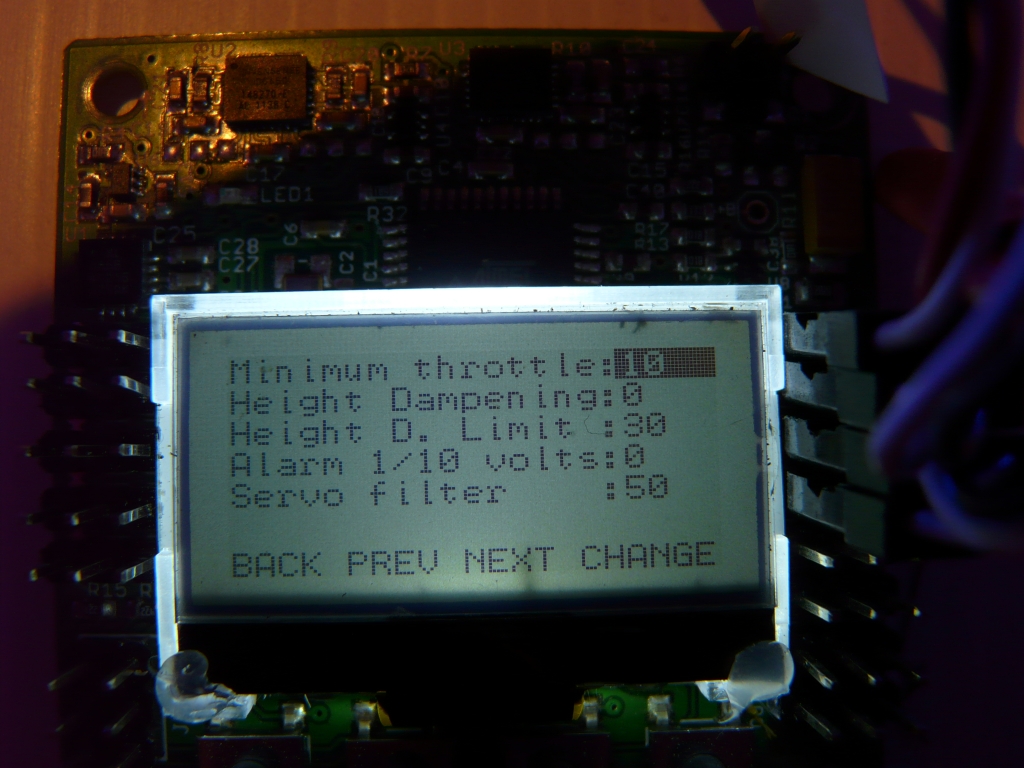
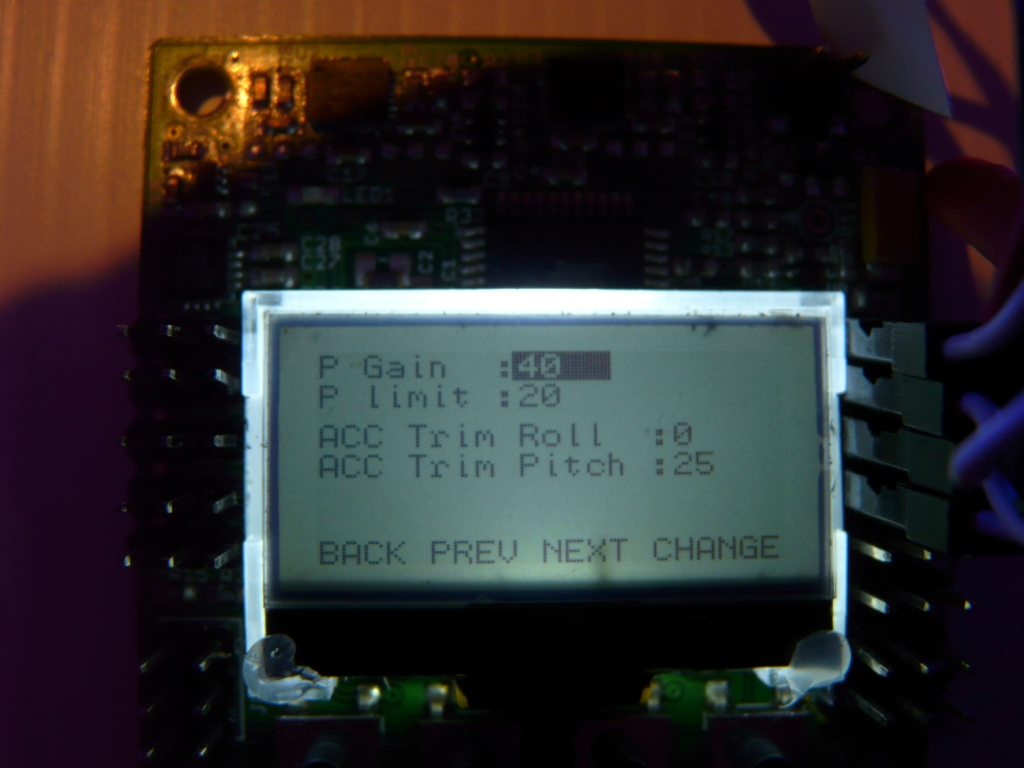
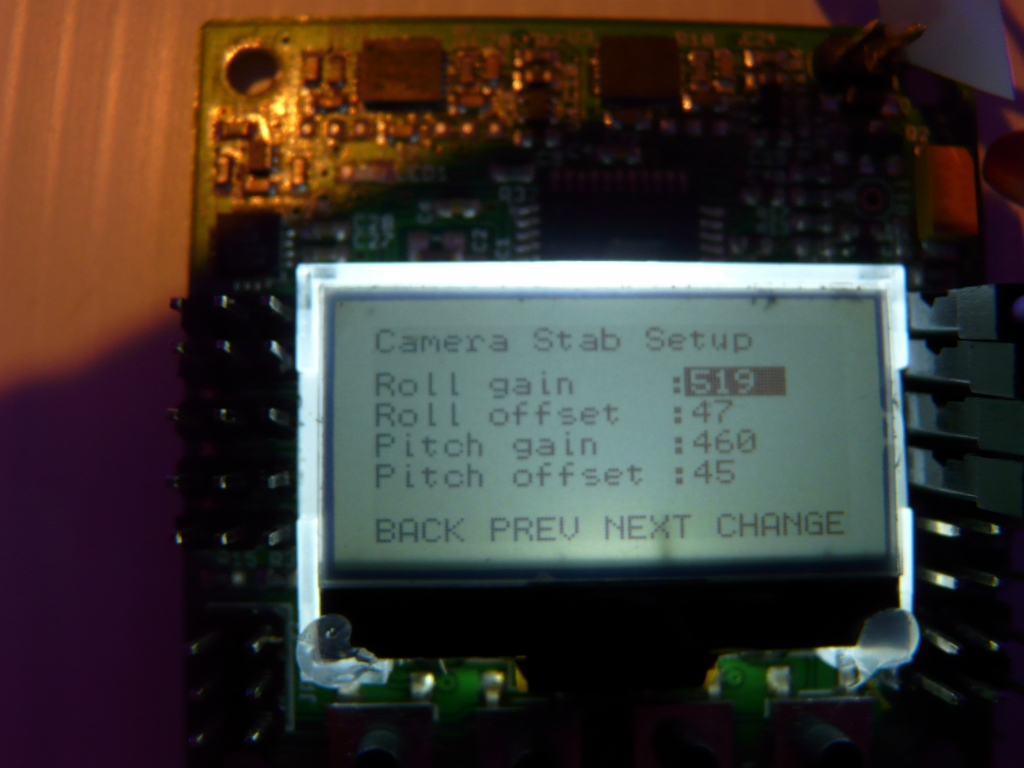
La carte de controle de quadri rotor est la carte HK KK2.0 LCD que j'ai déjà utilisée sur un autre quad. Elle reprend les éléments de config des cartes kk flashées en 4.7 mais avec un petit écran lcd qui simplifie la configuration pour un coût très accessible. Elle est associée à une carte de distribution de courant juste en dessous.

Une fois l'ensemble monté voici ce que l'on obtient. Les controleurs sont fixés sur la plaque de coroplast avec une pointe de colle chaude, les câbles sont rassemblés avec quelques colliers pour ordonner leur position.

Les rallonges de câbles sont soudées aux fils des contrôleurs, des prises PK 3,5mm sont soudées aux fils d'alimentation pour le raccordement à la carte de distribution. Les contrôleurs sont branchés à la carte de pilotage du quad (1: avant gauche, 2: avant droit, 3: arrière droit, 4: arrière gauche).

Préparation d'une seconde plaque de coroplast pour fermer le corps du quad et protéger les composants.

L'Araignée prend forme, ajout des hélices sur les supports moteurs, câblage du récepteur sur la carte de pilotage du quadri rotor, et pose de la fixation de batterie.

Voici le quadriolo type « araignée » prêt pour les vols de test.
Au final le poids, batterie 3S 3000mA, est de 1197g, ou 930g à vide.
Eric Latour a publié un article sur Jivaro.org décrivant une construction originale de quadcoptère à base de tuyau en plastique pour protéger des câbles électriques. Etant un adepte de la construction plastique, les SPAD à base de coroplast, je me suis lancé dans une adaptation de ce modèle.
Je l'ai appelé le Quadriolo type « araignée » en raison d'une ressemblance avec cette forme. Dites moi si un nom plus sympa vous vient à l'esprit.

J'ai conservé la forme de base de la version en H, un rectangle de 30cm par 11cm avec des angles droits plus courts, mais les bras sont en X. Pour parvenir à cette forme j'ai coupé les courbes larges à 90° en deux.
J'ai utilisé pour les collages des tubes la colle PVC conseillée pour ce matériau car elle agit en dissolvant le plastique, le résultat est très rigide.
La liste des pièces requises est la suivante :

Première étape montage à froid pour valider les bonnes dimensions des pièces
 Bati principal
Bati principal

Positionnement des coudes pour les tubes support moteurs
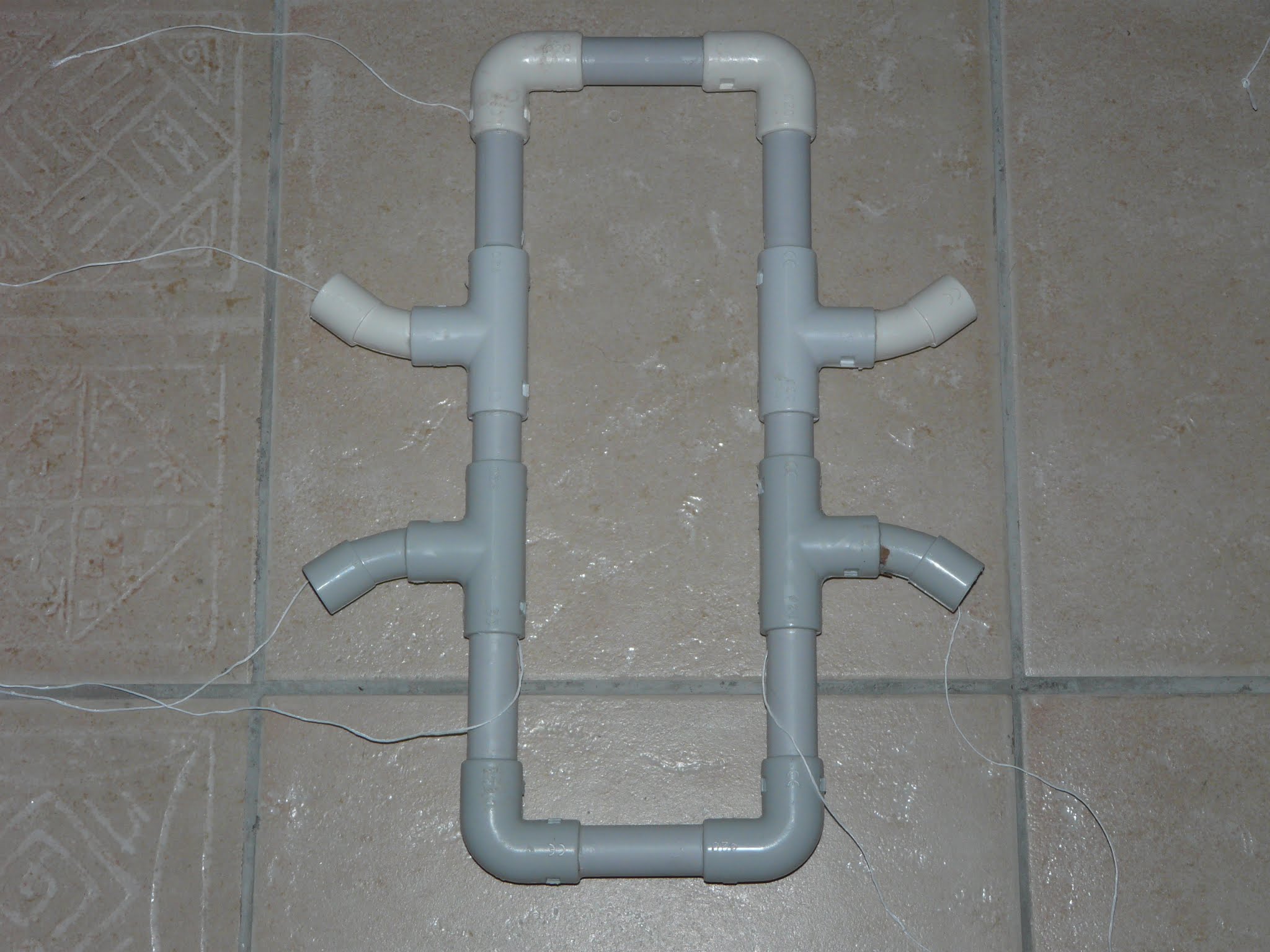
Positionnement des tubes support moteur, ça ressemble à une araignée.
Comme expliqué par Eric dans son guide il faut supprimer les bourrelets dans les T avec une dremel, les collages avec les tubes sont ainsi parfaits.
Le poids final obtenu est de 316g avant collage, et 327g après collage ce qui est raisonnable.
Pensez à passer des fils dans les coudes sur le bati principal pour faciliter ensuite la mise en place des câbles moteur vers les controleurs, comme ceci :
La suite avec l'arrivée des moteurs et controleurs, auparavant il me faut trouver les supports que je vais poser sur les tubes pour les accueillir.

